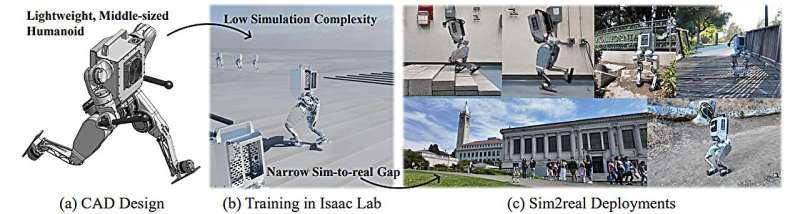
人形机器人设计的框架:ASAP
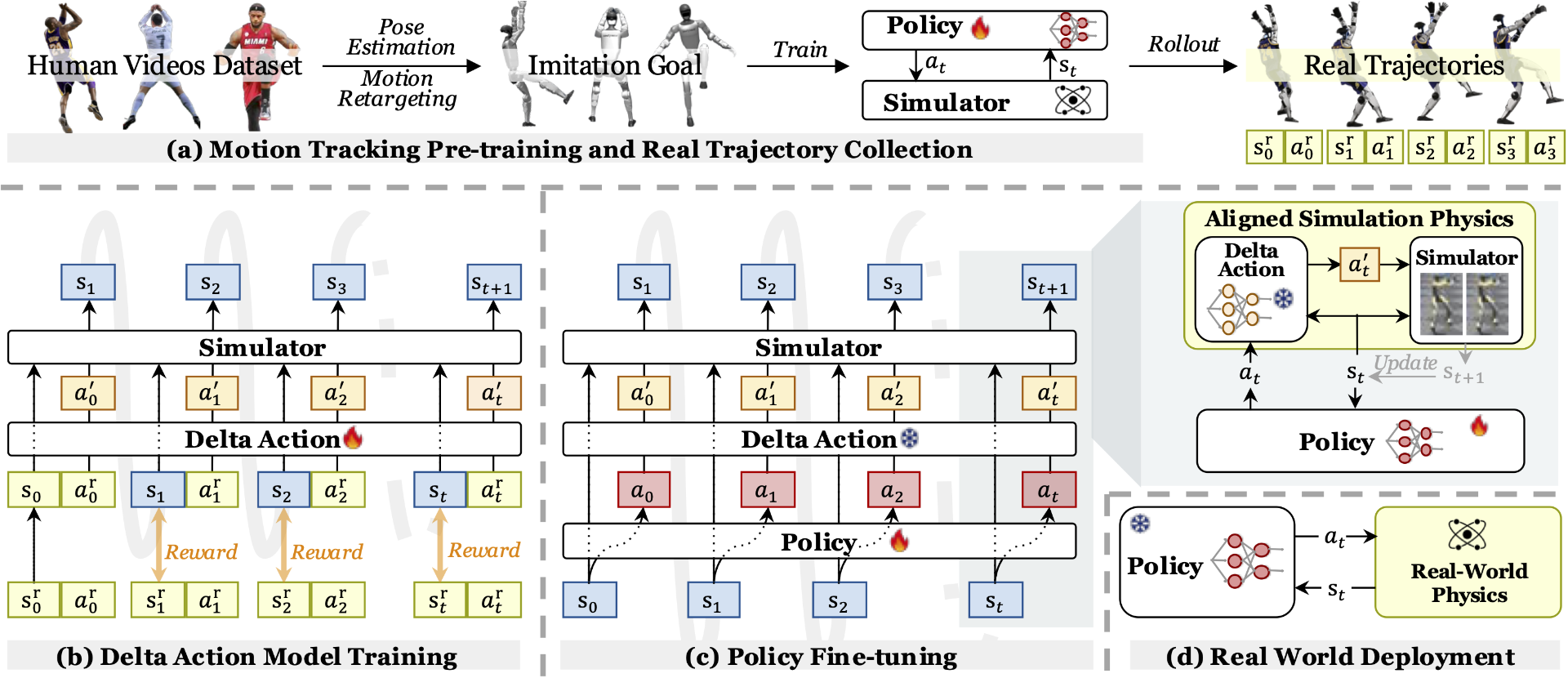
ASAP(Aligning Simulation and Real-world Physics),一个两阶段框架,用于解决人形机器人模拟与现实世界的动力学不匹配问题,以提升全身运动的敏捷性和协调性。
第一阶段:在模拟环境中使用人类运动数据训练运动跟踪策略。
第二阶段:在现实世界中部署策略,收集数据并训练 Delta Action 模型,以补偿动力学误差,并通过微调优化策略。
在多个模拟到现实的转移实验中,ASAP 相比 SysID、DR 及 Delta Dynamics 学习基准表现更优,显著提升了运动的敏捷性和精准度,展示了人形机器人在现实世界中实现高度敏捷运动的潜力。