OpenAI测试AI搜索功能SearchGPT
SearchGPT目前只是临时的原型,计划未来将新功能中最佳的那些直接融入ChatGPT。OpenAI将首先只对一小部分用户和发行商开放SearchGPT,从中获取反馈。
OpenAI并未在官网透露具体将接纳多少测试者。不过,OpenAI的发言人Kayla Wood告诉媒体,SearchGPT的服务由GPT-4系列模型提供支持,SearchGPT发布时仅提供1万名用户的测试名额。
SearchGPT目前只是临时的原型,计划未来将新功能中最佳的那些直接融入ChatGPT。OpenAI将首先只对一小部分用户和发行商开放SearchGPT,从中获取反馈。
OpenAI并未在官网透露具体将接纳多少测试者。不过,OpenAI的发言人Kayla Wood告诉媒体,SearchGPT的服务由GPT-4系列模型提供支持,SearchGPT发布时仅提供1万名用户的测试名额。
RoboflowSports是一个使用深度学习模型检测和识别运动员行为分析的工具。它通过检测和分割运动员和足球等对象,为体育数据分析提供了强大的工具。
它能识别并分割图像中的不同对象,例如运动员和足球,提供更精细的图像分析。通过精确的对象检测和图像分割技术,提供更高精度的体育数据分析,帮助教练和分析师更好地了解比赛情况和运动员表现。
它能够感知和表达情感,并根据上下文和人类指令提供多种风格的语音响应,如说唱、戏剧、机器人、搞笑和低语等。
超过10万小时的学术和野外收集的语音数据, 涵盖了丰富的语音场景和风格。
SpeechGPT2 是在有限资源下的技术探索,由于计算和数据资源的限制,它在语音理解的噪声鲁棒性和语音生成的音质稳定性方面仍有一些不足。
Mistral AI 宣布其旗舰开源模型的下一代产品:Mistral Large 2,该模型拥有 1230 亿个参数,在代码生成、数学、推理等方面与 OpenAI 和 Meta 的最新尖端模型不相上下。
紧随 Llama 3.1 405B 之后,Mistral Large 2 的发布让开源大模型的赛道一下子热闹起来,而这一模型的特点是 ——「足够大」。
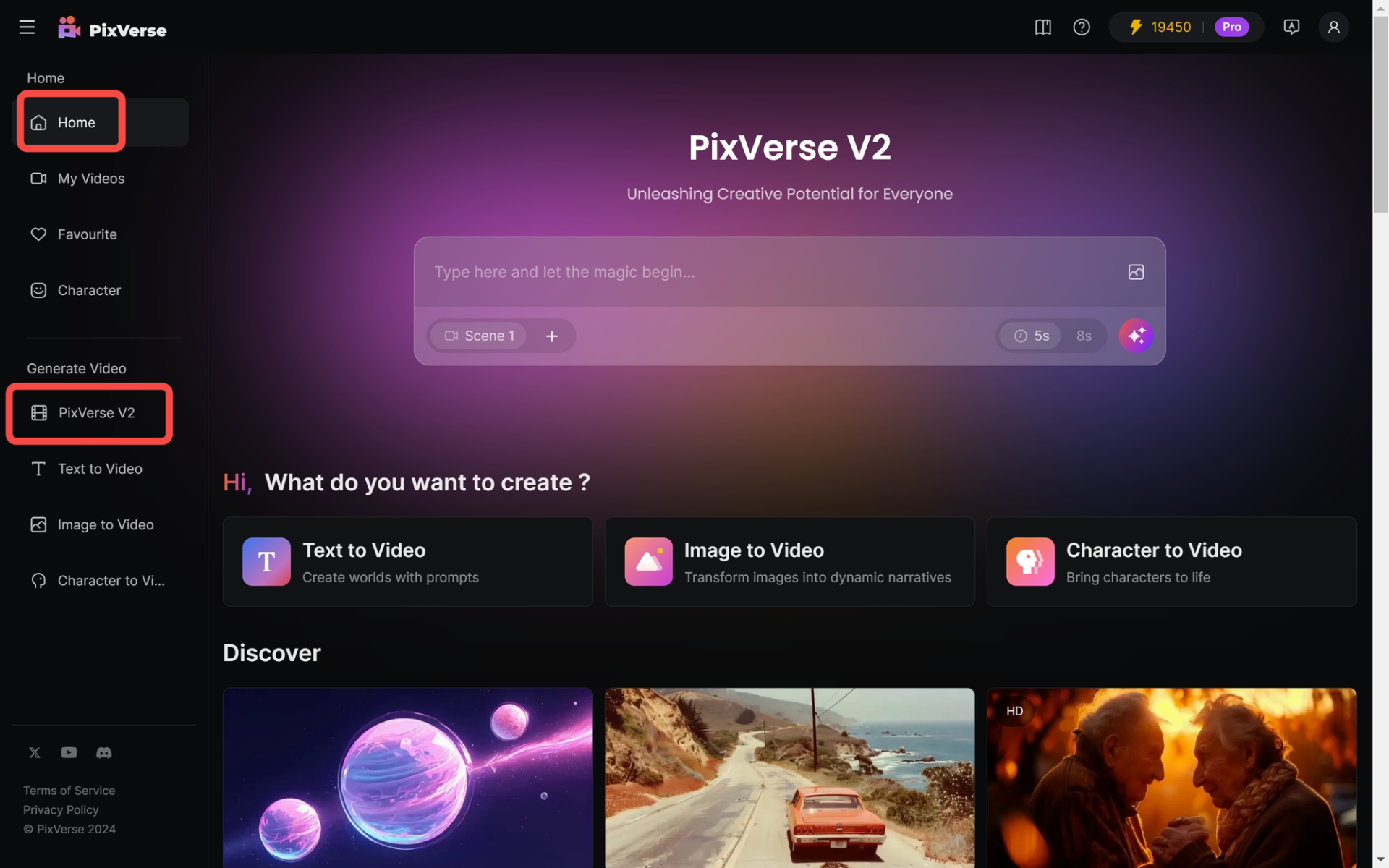
升级版的PixVerse V2,不光能生成8秒的视频,还能让你的创意天花乱坠。
别以为8秒就敷衍了事。这V2可是个细节控,分辨率、动态效果都跟打了鸡血似的。
就连蚂蚁打喷嚏,它都能给你拍得清清楚楚。
Adobe 最新的 Firefly Vector AI 模型,该模型今天开始公开测试。
这个新的 Firefly Vector 模型为 Illustrator 带来了诸多新功能,比如生成形状填充 (Generative Shape Fill),用户可以通过描述性文本提示为形状添加详细的矢量图形。更新后的模型还改进了文本到图案 (Text to Pattern) 的测试功能,可以用来创建可扩展的自定义矢量图案,如壁纸;还有样式参考 (Style Reference),能够生成与现有样式相匹配的输出。
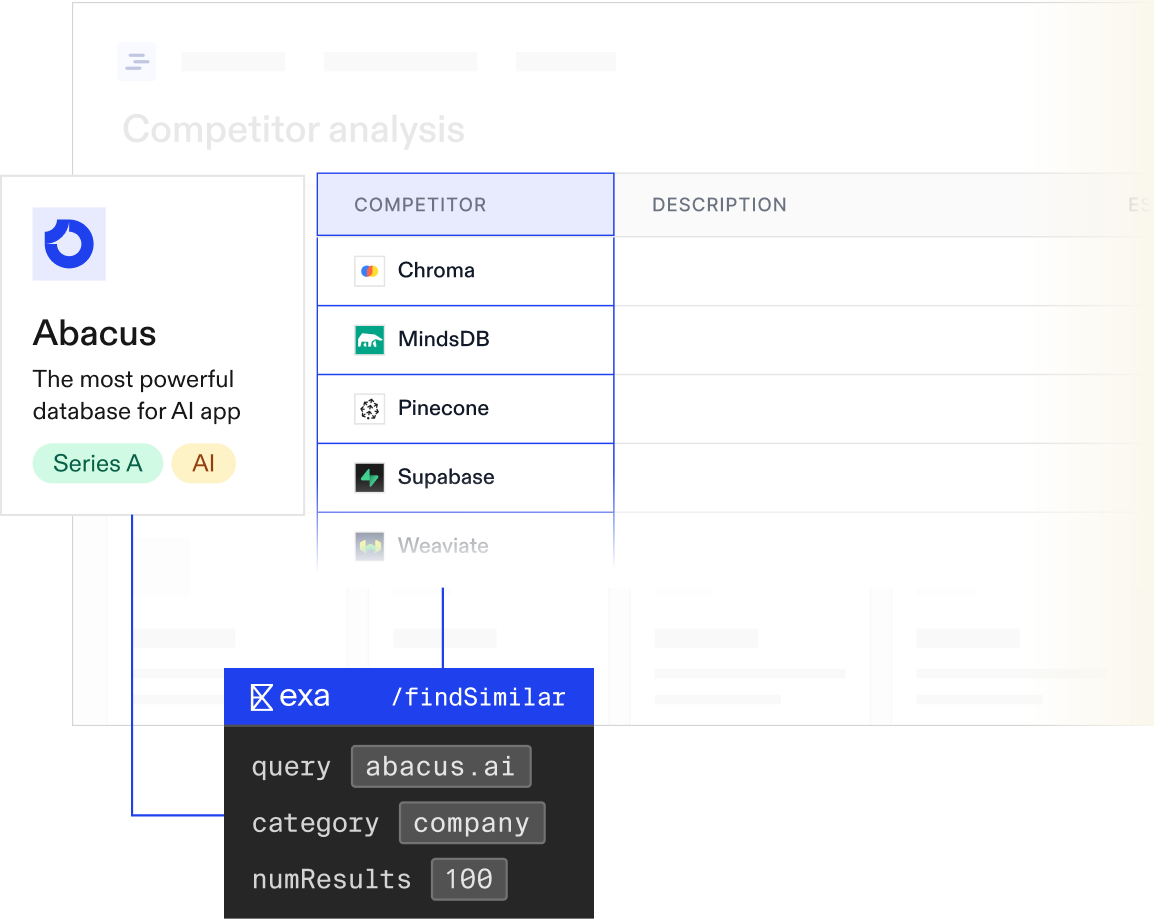
一个AI搜索引擎诞生:Exa AI。该公司最近宣布获得了1700万美元的A轮融资,由Lightspeed领投,Nvidia的NVentures和Y Combinator参投。
与其他旨在取代谷歌的AI驱动搜索引擎不同,Exa的目标是创建一个专门为AI设计的搜索工具。
WayveScenes101,这是一个数据集,旨在帮助社区推进新颖视图合成的最新技术,该数据集专注于具有挑战性的驾驶场景,其中包含许多具有不断变化的几何和纹理的动态和可变形元素。
该数据集包含 101 个驾驶场景,涵盖各种环境条件和驾驶场景。该数据集专为野外驾驶场景的基准重建而设计,场景重建方法面临许多固有的挑战,包括图像眩光、快速曝光变化以及具有明显遮挡的高动态场景。
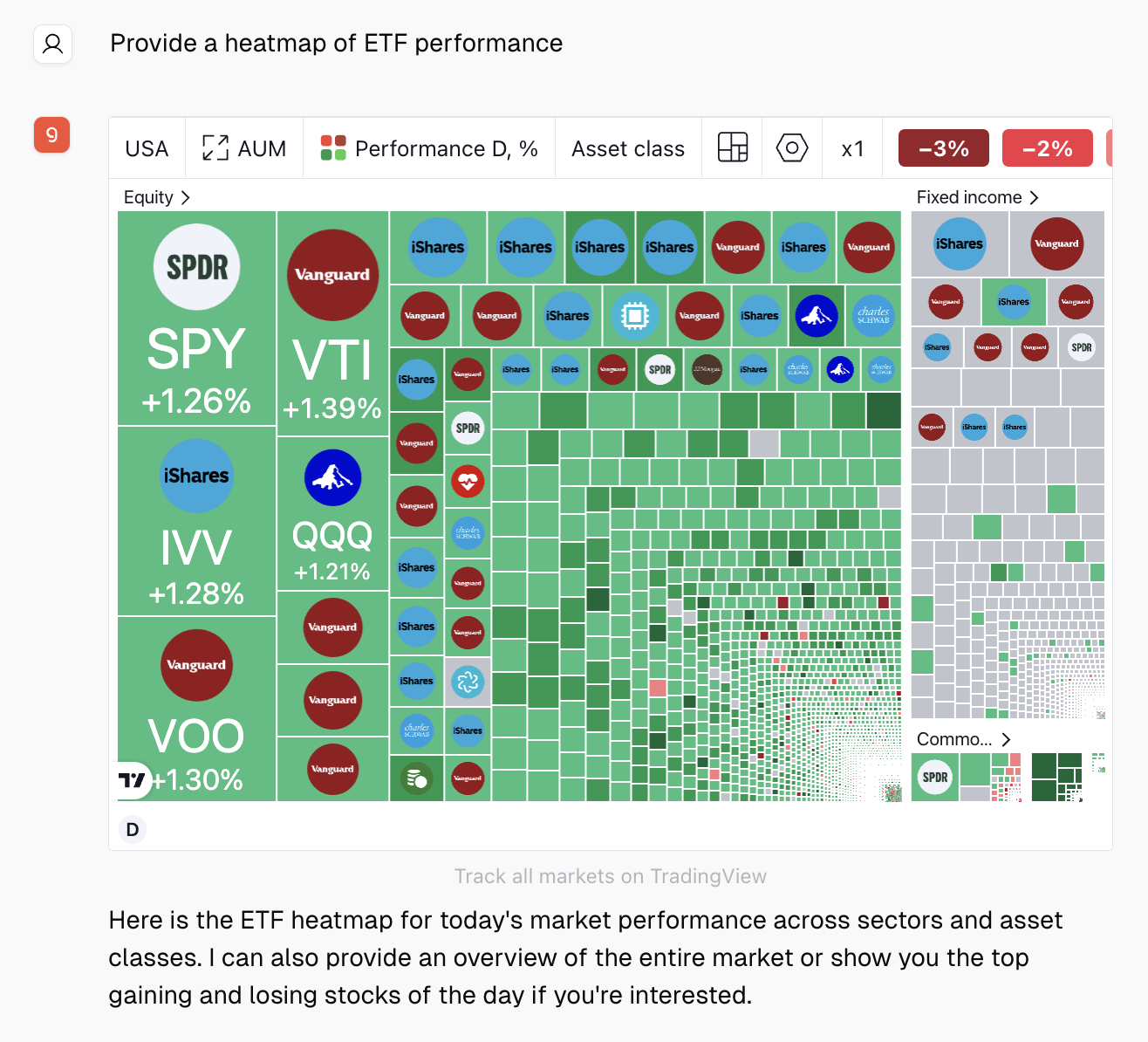
StockBot 是一款基于 ai 的聊天机器人,它利用 Groq 上的 Llama3 70b、Vercel 的 AI SDK 和 TradingView 的实时小部件,通过专门针对您的请求定制的实时交互式图表和界面进行对话响应。 StockBot由Groq 提供支持,闪电般快速的AI聊天机器人,可实时响应交互式股票图表、财务、新闻等。
它不仅能够展示每日市场表现热图、股票财务数据、价格历史和烛台图表,还能提供头条新闻和股票筛选器。它不仅支持股票,还涵盖了外汇、债券和加密货币,提供全面的市场分析。
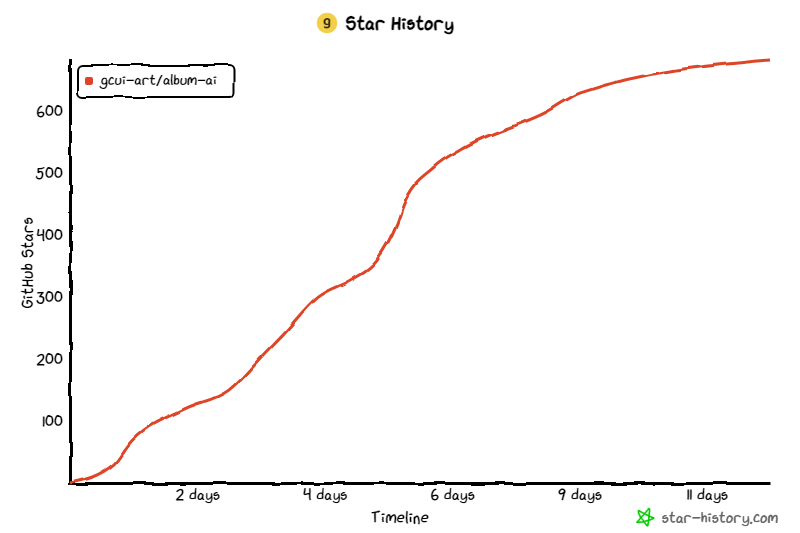
相册AI是一个实验项目,使用最近发布的gpt-4o-mini作为视觉模型,自动识别相册中图像文件的元数据。然后,它利用 RAG 技术来实现与专辑的对话。
它可以用作传统相册,也可以用作图像知识库来辅助LLM进行内容生成。
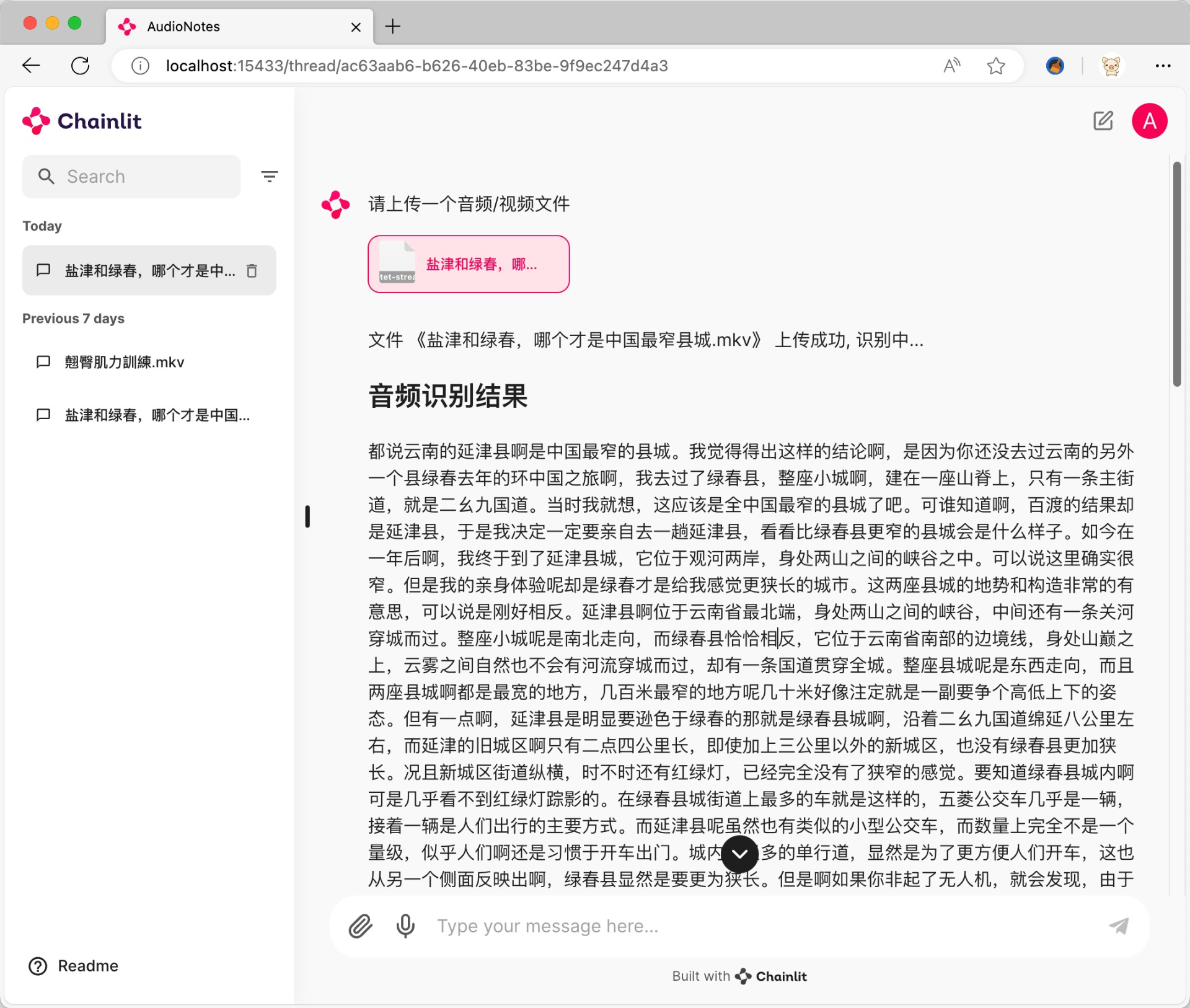
AudioNotes 是一个基于 FunASR 和 Qwen2 构建的音视频内容转结构化笔记系统。它的主要功能是快速提取音视频的内容,并通过调用大模型进行整理,将这些内容转换为结构化的Markdown笔记,便于用户快速阅读和理解。
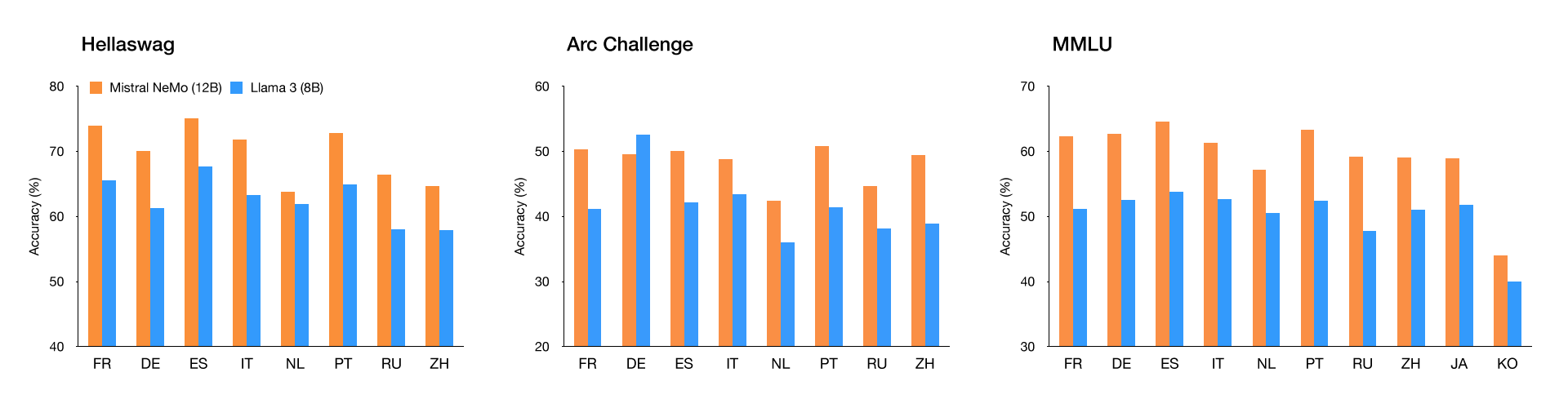
Mistral AI 宣布发布 Mistral NeMo,这是一个由 NVIDIA 协作开发的 12B 参数模型,具备高达 128k 令牌的上下文窗口。
该模型旨在支持企业应用,包括聊天机器人、多语言任务、编码和摘要。在其尺寸类别中,Mistral NeMo 在推理、世界知识和代码准确性方面均处于领先地位。使用标准架构,Mistral NeMo 易于使用,可作为任何使用 Mistral 7B 系统的直接替代品。
Microsoft Designer 与 Microsoft 产品无缝集成,包括 Word 和 PowerPoint,通过 Microsoft Copilot 进一步提升创意体验。订阅 Copilot Pro 后,当你在 Word 和 PowerPoint 中时,可以在你的工作流程中直接创建图像和设计。在 Word 或 PowerPoint 中,点击 Copilot 图标并描述你想创建的图像。在即将推出的 Word 版本中,你甚至可以请求创建文档横幅,并根据文档内容为你生成设计。
该模型支持包括普通话在内的 32 种语言,能为全球近 80%的地区提供高质量、低延迟的 AI 对话;
首次支持越南语、匈牙利语和挪威语;
重点提高了印地语、法语、西班牙语、普通话等 27 种语言的响应速度,其中英语速度提高了 25%,最高提升达 3 倍;
结合先进技术和低延迟模型架构,可快速合成语音,保持流畅自然且高品质的音质,响应时间不超 400 毫秒。
港中大(深圳)联合中科院声学所、上海人工智能实验室等机构发布了超过10万小时包含6种语言的多样化的语音生成数据集—— Emilia!
Emilia是一个开源的多语种外语音数据集,专为大规模语音生成研究设计。它包含超过101,000小时的六种语言高质量语音数据和相应的文本转录,覆盖了各种说话风格和内容类型,如脱口秀、访谈、辩论、体育评论和有声书。
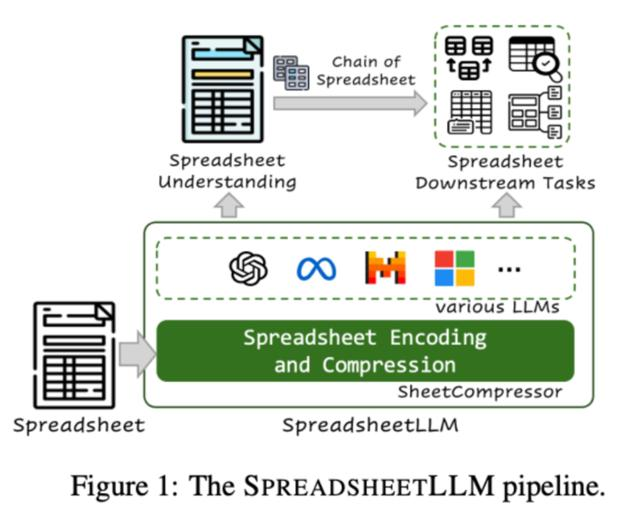
微软发布了一个新的大型语言模型,计划为 Excel、 Sheets 等电子表格应用程序开发全新的 AI 大语言模型–SpreadsheetLLM。
Microsoft在论文指出,SpreadsheetLLM作为一款全新的AI模型,将广泛使用于理解和处理但复杂的电子表格数据。
或许会让会计师和数据分析师们对他们的未来工作前景感到担忧。网友们在社交平台X上调侃,认为“凯伦的工作很快就会被人工智能取代”。