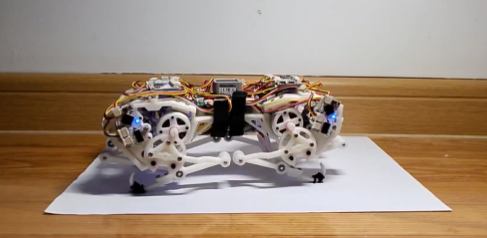
這是一個低成本、8自由度(8DOF)可控扭矩開源四足機器人項目。
該項目包括硬體CAD設計、電子驅動器和主控制板、V-sup模擬、運動學和動力學以及硬體。
很有趣,有興趣的話可以玩!😃
GitHub:https://github.com/psrobotics/quadruped_bai_tiny
這是一個低成本、8自由度(8DOF)可控扭矩開源四足機器人項目。
該項目包括硬體CAD設計、電子驅動器和主控制板、V-sup模擬、運動學和動力學以及硬體。
很有趣,有興趣的話可以玩!😃
GitHub:https://github.com/psrobotics/quadruped_bai_tiny