使用 OpenAI Agents 实现的客户服务用例演示
展示了如何使用 OpenAI 的 Agents SDK 搭建一个多智能体(multi-agent)的客户服务系统,聚焦于航空客服场景
展示了如何使用 OpenAI 的 Agents SDK 搭建一个多智能体(multi-agent)的客户服务系统,聚焦于航空客服场景
EdgePersona 是一个开源项目,旨在创建一个完全本地化运行的智能数字人系统。该系统设计轻量高效,对硬件要求低,适合在普通笔记本电脑上运行,保障用户隐私。

WeClone 是一个开源项目,旨在通过微信聊天记录微调大型语言模型(LLM),实现个性化的数字分身,并可部署为微信、QQ、Telegram 等平台的聊天机器人。
5ire是一款开源的跨平台桌面AI助手,同时也是Model Context Protocol(MCP)客户端,旨在为用户提供与主要AI服务商无缝对接的智能体验。

Meta Motivo 是由 Meta 的 FAIR(Facebook AI Research)团队开发的行为基础模型,旨在控制虚拟的基于物理的仿人代理,使其能够执行各种全身任务。
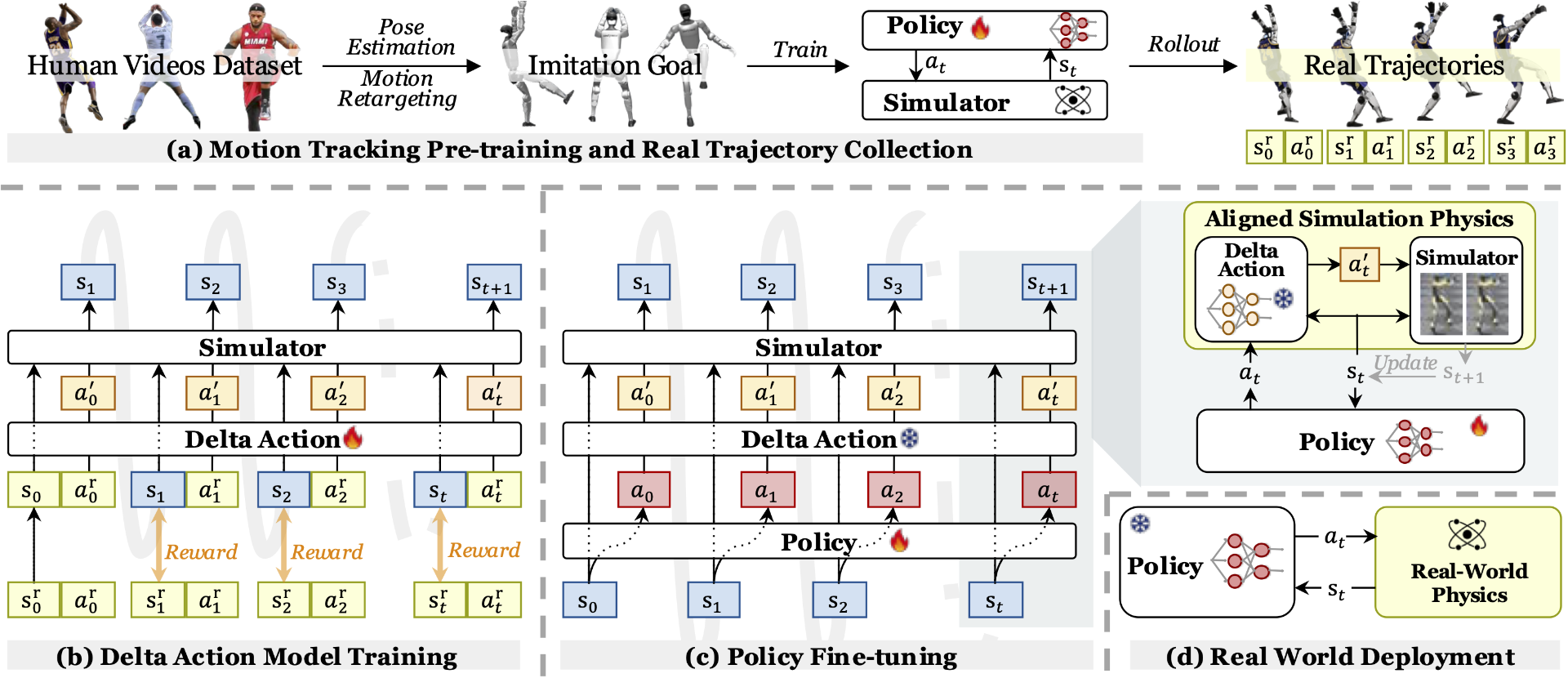
ASAP(Aligning Simulation and Real-world Physics),一个两阶段框架,用于解决人形机器人模拟与现实世界的动力学不匹配问题,以提升全身运动的敏捷性和协调性。
第一阶段:在模拟环境中使用人类运动数据训练运动跟踪策略。
第二阶段:在现实世界中部署策略,收集数据并训练 Delta Action 模型,以补偿动力学误差,并通过微调优化策略。
在多个模拟到现实的转移实验中,ASAP 相比 SysID、DR 及 Delta Dynamics 学习基准表现更优,显著提升了运动的敏捷性和精准度,展示了人形机器人在现实世界中实现高度敏捷运动的潜力。

支持在移动设备上实时运行的超轻量级数字人模型
Ultralight-Digital-Human 是一个创新的开源项目,使得数字人在移动设备上的实时应用成为可能,旨在实现超轻量级的数字人模型,其能够在移动设备上实时运行。
支持在移动设备上实时运行的超轻量级数字人模型
提供了详细的训练和推理步骤
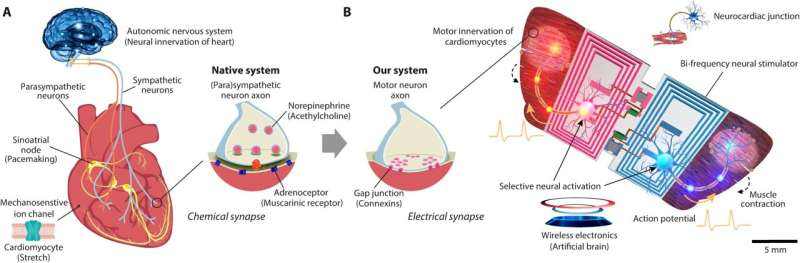
來自美國布萊根婦女醫院和瑞士 iPrint 研究所的生物研究人員和機器人專家組成的聯合團隊,利用人類運動神經元和心肌細胞來模擬肌肉組織,開發了微型游泳機器人。
他們的論文發表在《科學機器人》雜誌。科羅拉多大學博爾德分校的機械工程師Nicole Xu 在同一期期刊上發表了一篇焦點文章
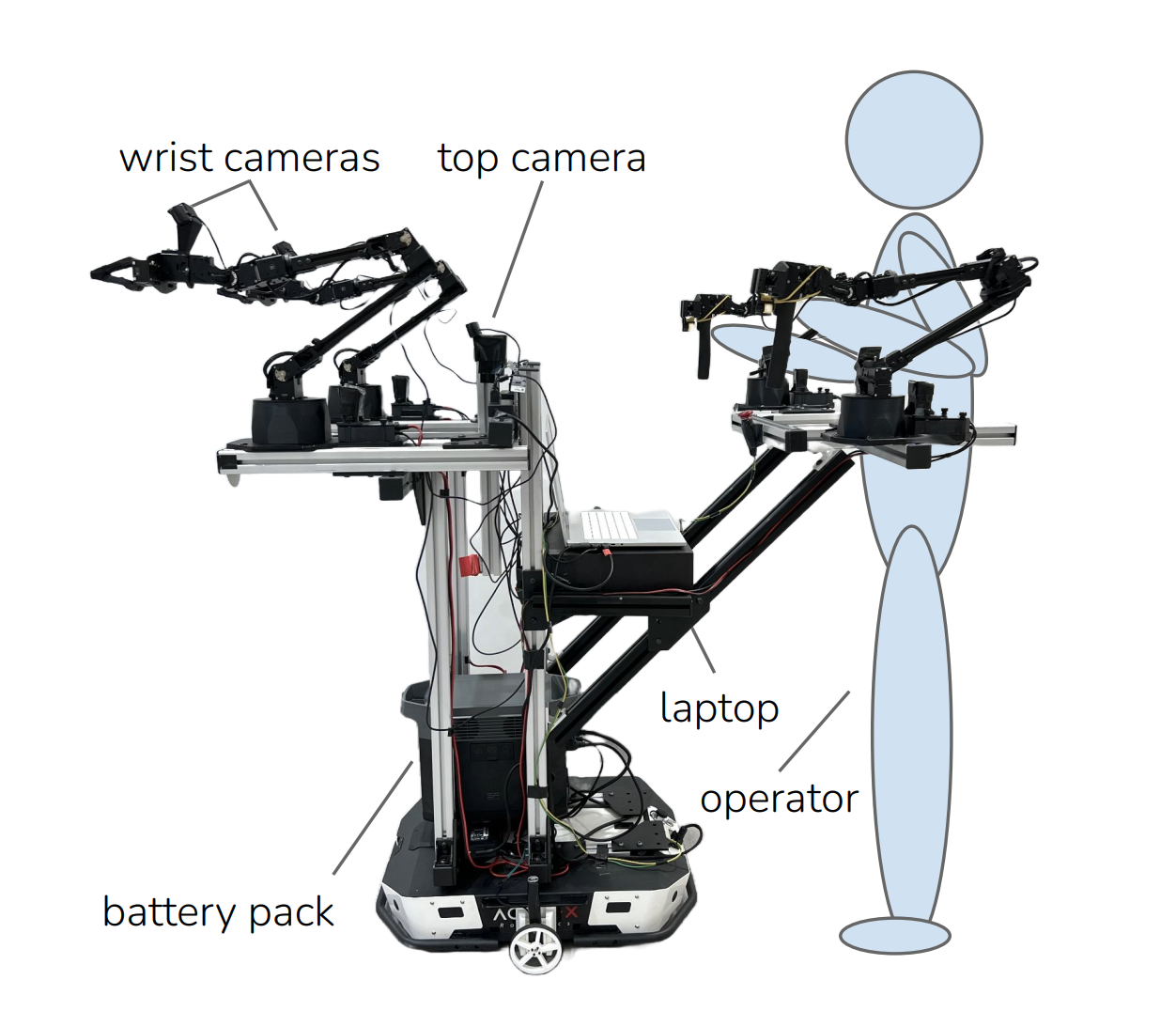
ALOHA Unleashed 和 DemoStart
谷歌 DeepMind 项目的工程师宣布开发出两种新的基于人工智能的机器人系统。一款名为 ALOHA Unleashed 的产品是为了推进双臂操控科学而开发的。另一个名为 DemoStart,旨在提高具有多个手指、关节或传感器的机器人手的功能

赫特福德郡大学的研究人员开发了一种新算法,可以让机器人更直观地发挥作用,即利用环境作为指导做出决策
其原理是,通过算法,机器人代理创建自己的目标
该算法第一次将不同的目标设定方法统一在一个与物理学直接相关的概念下,而且它还使计算透明,以便其他人可以研究和采用它。
该算法的原理与著名的混沌理论有关

一台长形机器人进入日本福岛核电站受损的反应堆,开始执行为期两周的高风险任务,首次从底部回收少量熔化的燃料碎片。
机器人进入 2 号机组反应堆是接下来发生的事情的关键第一步——这是一个令人畏惧的、长达数十年的过程,目的是让核电站退役并处理因大规模爆炸而损坏的三个反应堆内的大量高放射性熔化燃料。